本周总结
主要完成了如下工作
- 配置虚拟环境 rlgpu 并安装 Isaac Gym 和 IsaacGymEnvs
- 阅读 MICRO_Quadruped_ARCHIVE 源代码并写注释
- 学习了信赖域方法
2023.07.10
Unitree sdk
Zotero + WebDAV + Synchrony NAS
By default, Zotero will sync your local data with the Zotero servers whenever changes are made.
条目数据同步方式为云数据库的数据与本地数据存储文件夹 storage (用于存放附件) 同步
Data syncing syncs library items, but doesn’t sync attached files (PDFs, audio and video files, images, etc.). To sync these files, you can set up file syncing to accompany data syncing, using either Zotero Storage or WebDAV.
条目数据依靠 Zotero 同步,附件同步依靠 Zotero 或 WebDAV
Zotero 文献管理、科研笔记不完全教程 | loturest
解决方法:
- Preference $\rightarrow$ Sync $\rightarrow$ File Sync
- 先选择 Zotero
- 然后再选择 WebDAV
- 此时发现 NAS 上的云的文件与 zotero 中的文件对齐了
NAS

2023.07.11
Breakout / PPO / 调试超参数
learning_rate 的选择
1 | lr_set = {1e-2, 2e-2, 5e-2, 1e-3, 2e-3, 5e-3, 1e-4, 2e-4, 5e-4, 1e-5, 2e-5, 5e-5, // |
设定 learning rate schedule $*$
1 | from typing import Callable |
batch_size 的作用
1 | batch_size=128 |
batch_size 过高会降低模型的泛化能力?
重读 Stable-baselines3 官方文档
参考资料
paper: Stable-Baselines3: Reliable Reinforcement Learning Implementation
Reinforcement Learning Tips and Tricks Web$*$ Slides$*$
Custom Task Definition
- observation space
- action space
- reward function
- termination conditions
Choosing the observation space
- enough information to solve the task
- do not break Markov assumption
- normalization
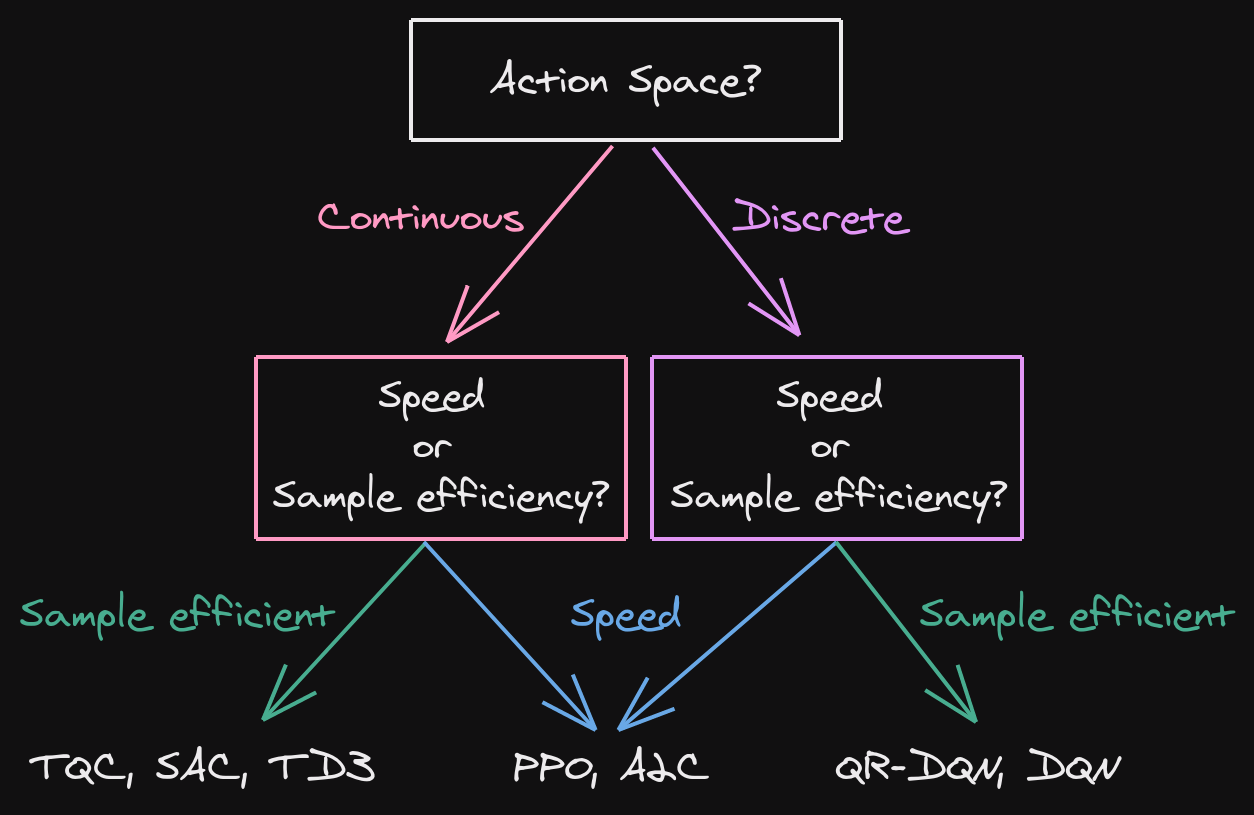
Algorithm Selection
- define action space: discrete / continuous / …
- prefer sampling efficiency or speed?
- whether you can parallel the training: look at vectorized Environments to learn more about training with multiple workers
Creating a custom environment
- normalize the observation space and action space (when continuous)
- If there is some time delay between action and observation (e.g. due to Wi-Fi communication), you should give a history of observations as input.
Vectorized Environments $*$
搞不明白 DummyVecEnv 和 SubprocVecEnv 的区别。在官方给出的表格中,前者不能 Multi-processing,而后者可以,但是实际训练时前者训练速度更快?!
2023.07.12
NVIDIA / Isaac Omniverse / Isaac Sim
Isaac Gym Preview 4 & IsaacGymEnvs
Paper: Isaac Gym: High Performance GPU-Based Physics Simulation For Robot Learning
Forum: Latest Robotics - Isaac/Isaac Gym topics - NVIDIA Developer Forums
Projects:
- GitHub | leggedrobotics/legged_gym: Isaac Gym Environments for Legged Robots
- GitHub | guichristmann/thormang3-gogoro-PPO: Steering-based control of a two-wheeled vehicle using RL-PPO and NVIDIA Isaac Gym.
- GitHub | jmcoholich/isaacgym [Unitree Aliengo]
GitHub: GitHub | NVIDIA-Omniverse/IsaacGymEnvs: Isaac Gym Reinforcement Learning Environments
镜像: GitCode | mirrors / NVIDIA-Omniverse / IsaacGymEnvs · GitCode
安装与环境配置资料查阅
Blog:
- NVIDIA 公司推出的 GPU 运行环境下的机器人仿真环境(NVIDIA Isaac Gym)的安装
- issacgym + leggedgym 安装 | RobotFreak 的博客
- Isaac-gym(1): 安装及官方 demo 内容 | hongliyu lvliyu 的博客 (参考此方法)
- Isaac Gym 安装及使用教程 - 知乎 (参考此方法)
- Isaac Gym(一)在 Ubuntu20.04.1 中安装 Isaac Gym | 墨绿色的摆渡人的博客
- 使用 Isaac Gym 来强化学习 mycobot 抓取任务 (采用此方法)
Documentation:
- 在
isaacgym/docs目录下打开index.html文件
重要事实
- Isaac Gym 是 Nvidia 为强化学习开发的物理模拟环境。基于 OpenAI Gym 库,物理计算在 GPU 上进行,结果可以作为 Pytorch GPU 张量接收,从而实现快速模拟和学习。物理模拟是使用 PhysX 进行的,它还支持使用 FleX 的软体模拟。
- 可以从 Nvidia的开发人员页面免费下载 Isaac Gym 主软件包。文档以 HTML 格式保存在软件包的“docs”目录中(请注意,网站上没有)
- 推荐环境:
- Ubuntu 18.04、20.04
- Python 3.6~3.8
- Nvidia Driver>=470
- 文件 rlgpu_conda_envs.yml 中写出了 isaac gym 的依赖库
- python=3.7
- pytorch=1.8.1
- torchvision=0.9.1
- cudatoolkit=11.1
- pyyaml>=5.3.1
- scipy>=1.5.0
- tensorboard>=2.2.1
- IsaacGymEnvs 是一个 Python 软件包,用于在 Isaac Gym 中测试强化学习环境。通过参考实现的任务,可以使用 rl-games 中实现的强化学习算法轻松构建强化学习环境。即使对于那些计划编写自己的强化学习算法的人,也建议尝试使用此软件包与 Isaac Gym 一起学习。它最初包含在 Isaac Gym 中,在 Preview3 中分离出来,现在在 GitHub 上公开可用
安装及报错解决
在进行第 2,3 步之前先看第 5 步!
环境
- Ubuntu 22.04 LTS (可能会有问题?未来如果出现问题,溯源时首先需要检查这里是否有问题)
- Python 3.7
- Nvidia Driver 525
创建名为 rlgpu 的虚拟环境并激活环境
1
2(base) ... ~$ conda create -n rlgpu python=3.7
(base) ...~$ source activate rlgpu安装依赖库
Isaac Gym 主要就是依赖 pytorch, torchvision, cudatoolkit, tensorboard,而 IsaacGymEnvs 的运行依赖 Isaac Gym
1
2(rlgpu) ... ~$ conda install pytorch torchvision torchaudio pytorch-cuda=11.7 -c pytorch -c nvidia
(rlgpu) ... ~$ pip install tensorboard下载 Isaac Gym - Preview Release
首次登录需要注册并成为会员 (免费)
安装 Isaac Gym
解压
IsaacGym_Preview_4_Package.tar.gz文件放在主目录下进入
IsaacGym_Preview_4_Package\isaacgym\docs,双击index.html打开官方文档,按照步骤安装方法 1(失败):直接建立新的虚拟环境
1
2
3
4
5(base) ... ~$ cd isaacgym/python/
(base) ... ~$ sh ../create_conda_env_rlgpu.sh
# 或者
(base) ... ~$ bash ../create_conda_env_rlgpu.sh结果在创建新环境时一直卡在 Solving Environment
方法 2(成功):如步骤 2,3 创建环境之后
1
(base) ... ~$ source activate rlgpu
当上述两个方法二选一之后,可以通过如下方式安装 Isaac Gym:首先返回
python子目录下,激活 rlgpu 环境,接着执行如下命令1
(rlgpu) ... ~/isaacgym/python$ pip install -e .
安装 IsaacGymEnvs
直接通过 git clone 的方式安装
1
git clone https://github.com/NVIDIA-Omniverse/IsaacGymEnvs.git$ cd IsaacGymEnvs
失败,换用镜像安装
1
git clone https://gitcode.net/mirrors/NVIDIA-Omniverse/IsaacGymEnvs.git
类似地
1
(rlgpu) ... ~/IsaacGymEnvs$ pip install -e .
测试
通过 PyCharm 打开 IsaacGymEnvs 项目,右下角选择添加 Python 本地解释器,选择 Conda,选择 rlgpu
打开
isaacgymenvs目录下的train.py,点击运行,发现报错ImportError: libpython3.7m.so.1.0: cannot open shared ogject file:...报错处理
首先找出系统中的
libpython3.7m.so.1.0的位置1
(base) ... ~$ find / -name "libpython*=3.7m.so.1.0"
输入可能如下所示
1
2
3
4
5...
/home/cc/anaconda3/envs/rlgpu/lib/libpython3.so
/home/cc/anaconda3/envs/rlgpu/lib/libpython3.7m.so
/home/cc/anaconda3/envs/rlgpu/lib/libpython3.7m.so.1.0
...找到任意一个
libpython3.7m.so.1.0,复制到/usr/lib/x86_64-linux-gnu目录下1
(base) ... ~$ sudo cp /home/cc/anaconda3/envs/rlgpu/lib/libpython3.7m.so.1.0 /usr/lib/x86_64-linux-gnu
再次运行
train.py,结果成功训练 Anymal
在 PyCharm 中打开 Terminal 终端,找到
train.py对应的目录,选择 task 为 Anymal1
(rlgpu) ... ~/IsaacGymEnvs/isaacgymenvs$ python train.py task=Anymal
IsaacGymEnvs 文件结构
IsaacGymEnvs
1 | > .gitlab |
docs
1 | > images |
isaacgymenvs
1 | > cfg # configuration |
isaacgymenvs/Readme.md
Running the ANYmal
1 | (rlgpu) ... ~/IsaacGymEnvs$ python isaacgymenvs/train.py task=Anymal |
结果将会保存在 runs 文件夹下
TensorBoard
训练过程的 Callback 数据保存在 runs/EXPERIMENT_NAME/summaries 文件夹,其中 EXPERIMENT_NAME 一般和 Task 的名字有关,也可以通过参数 experiment 进行设定
在命令行中输入
1 | (rlgpu) ... ~/IsaacGymEnvs$ tensorboard --logdir ./isaacgymenvs/runs/EXPERIMENT_NAME/summaries |
点击 http://localhost:6006/ 查看结果
Loading trained models / Checkpoints $*$
Checkpoints 将会保存在 runs/EXPERIMENT_NAME/nn 文件夹下
如果想要继续训练
1 | python train.py task=Ant checkpoint=runs/Ant/nn/Ant.pth |
如果想要进行测试
1 | python train.py task=Ant checkpoint=runs/Ant/nn/Ant.pth test=True num_envs=64 |
Configuration and command line arguments
使用 Hydra 进行配置文件的管理,在 train.py 文件中有 import hydra
有如下参数 task, train (选择 training config), num_envs, seed, sim_device (用于物理模拟的 device), rl_device (用于强化学习的 device), graphics_devices_id, pipeline (使用 GPU 或 CPU,详见文档), test (不进行训练), checkpoint (指定 load checkpoint 的路径), headless, experiment (设定实验名称), max_iterations
默认配置文件信息可以在 isaacgymenvs/config/config.yaml 找到
task 的配置文件可以在 isaacgymenvs/config/task/<TASK>.yaml 中找到并且用于 train 的配置文件位于 isaacgymenvs/config/train/<TASK>PPO.yaml.
Usage — OmegaConf 2.4.0.dev0 documentation
Tasks
Tasks 的源代码在 isaacgymenvs/tasks 中,它们的基类在 isaacgymenvs/tasks/base/vec_task.py 中
Isaac Sim - Robotics Simulation and Synthetic Data Generation | NVIDIA Developer
暂时未遇到这个问题
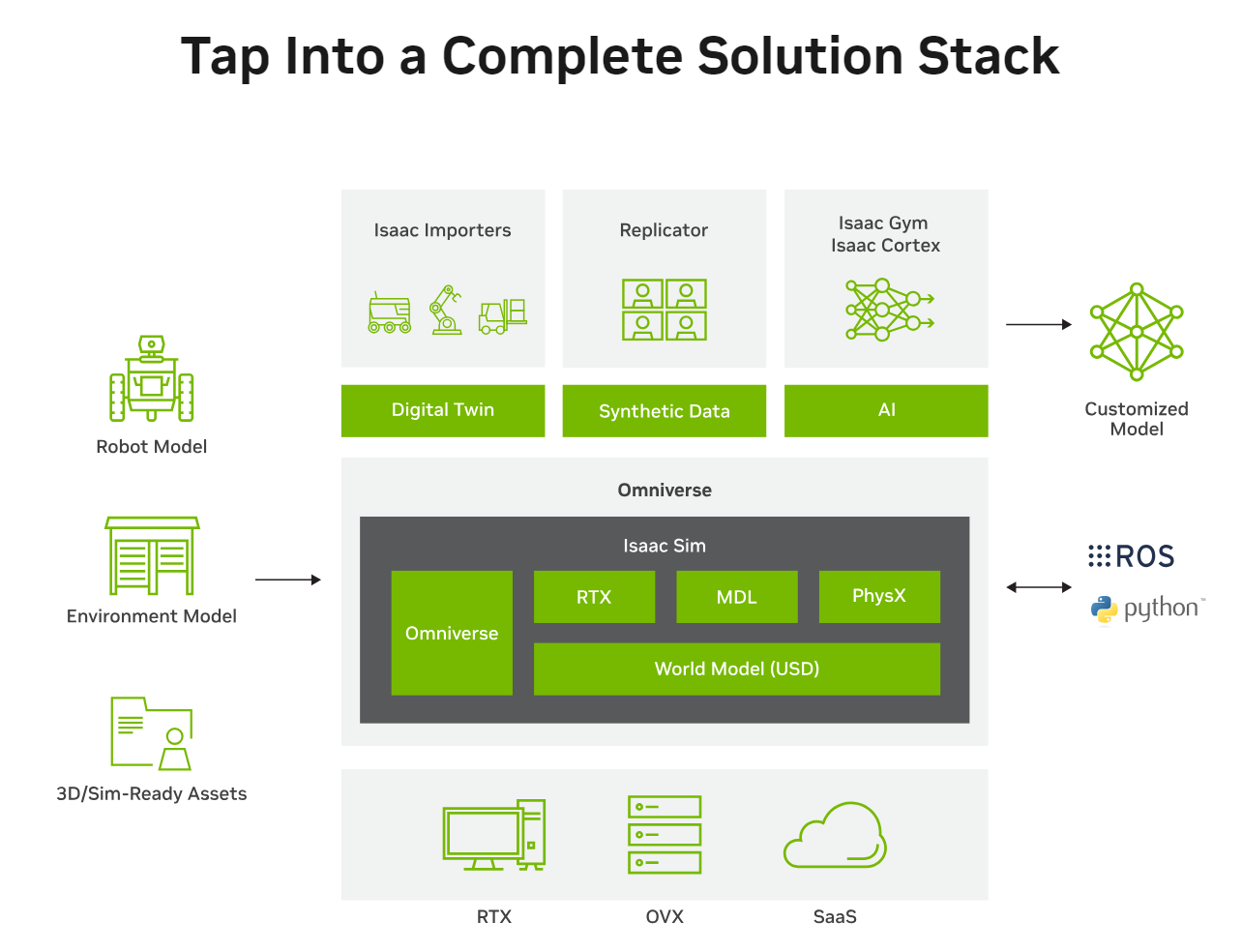
What Is Isaac Sim — Omniverse Robotics documentation
NVIDIA Omniverse™ Isaac Sim is a robotics simulation toolkit for the NVIDIA Omniverse™ platform. Isaac Sim has essential features for building virtual robotic worlds and experiments. It provides researchers and practitioners with the tools and workflows they need to create robust, physically accurate simulations and synthetic datasets. Isaac Sim supports navigation and manipulation applications through ROS/ROS2. It simulates sensor data from sensors such as RGB-D, Lidar, and IMU for various computer vision techniques such as domain randomization, ground-truth labeling, segmentation, and bounding boxes.
Isaac Sim: Extensions API — Isaac Sim 2022.2.1-beta.29 documentation
TAO Toolkit | NVIDIA Developer
Eliminate your need for mountains of data and an army of data scientists as you create AI/machine learning models, and speed up the development process with transfer learning - a powerful technique that instantly transfers learned features from an existing neural network model to a new customized one
The NVIDIA TAO Toolkit, built on TensorFlow and PyTorch, uses the power of transfer learning while simultaneously simplifying the model training process and optimizing the model for inference throughput on the target platform. The result is an ultra-streamlined workflow. Take your own models or pre-trained models, adapt them to your own real or synthetic data, then optimize for inference throughput. All without needing AI expertise or large training datasets.
Isaac Gym - Preview Release | NVIDIA Developer
目前可供选择的是 Preview 4
在终端打开
.py文件时,首先到定位到文件所在文件夹位置
2023.07.13
IsaacGymEnvs
isaacgymenvs/tasks/base/vec_task.py
所有的自定义 Task 类都应该基于 VecTask 类,而 VecTask 继承了抽象类 Env
初始化Env 时:
- 实例化参数:
config(主要是config["env"]),sim_device(包括device_type,device_id),rl_device,graphics_device_id,headless - 配置文件 config (dictionary) 中必须提供
numEnvs,numObservations,numActions - 配置文件 config (dictionary) 中的可选参数:
numAgents,numStates,controlFrequencyInv,clipObservations,clipActions,enableCameraSensors
Env 内含:
- @abc.abstractmethod (子类继承该抽象基类时必须拥有以下方法):
allocate_buffer(),step(),reset(),resets_idx() - @property (将方法转化为属性):
observation_space,action_space,num_envs,num_acts,num_obs - 其他:
set_train_info(),set_env_state(),set_env_state()
初始化 VecTask 时:
- 配置文件参数 config 中必须提供
"physics_engine"
VecTasks 内含:
set_viewer(),allocate_buffers(),create_sim(),get_state(),reset(),render(),…- @abc.abstractmethod:
pre_physics_step,post_physics_step
重点讲讲 step() 函数
在 Stable-Baseline3 中,自定义环境需要继承基类 gym.Env,同时要求重写 (@abc.abstractmethod) 方法 step,reset 和 render。其中 step 函数输入基于 RL 算法的 Policy 所提供的动作,并在仿真环境中进行动力学解算,最后计算 observation,rewards,terminated 和 info 并返回
但是在 IsaacGymEnvs 中,step 上述过程被进一步细化为
pre_physics_step:用于 apply actionsself.gym.simulation中进行动力学解算post_physics_step:用于计算 observation,rewards,resets,…
Python 新知
列表生成式,生成器 (generator),迭代器 (iterator)
1 | # 列表生成式 |
匿名函数 lambda
1 | list(map(lambda x: x * x, [1, 2, 3, 4, 5, 6, 7, 8, 9])) |
__init__.py
1 | - demo.py |
abc, ABC, abstractmethod
1 | import abc |
注解类型 typing
- List[int], Dict[str, int], Tuple(int, str, int), Tuple(int, …)
- Any, Union[int, str], Optional[int] = Union[int, None]
- NewType
@property
- 将方法转化为属性
- 属性的方法名不要和实例变量重名
1 |
|
面向对象2:之抽象基类:import abc, metaclass=abc.ABCMeta | Recently_祝祝的博客
from abc import ABC,abstractmethod 是什么意思 | 音程的博客
要定义一些抽象方法,然后子类继承的时候必须要重写这些方法。出于这个目标,我们就要用到abc这个包。
@abstractmethod表示这个方法是一个抽象方法,子类必须重写
2023.07.14
gym / envs / mujoco / halfcheetah v1, v3, v4
gym/core.py 定义了抽象基类 Env。主要的 API 方法有 step(),reset(),render(),close(),seed(),其中 abc.abstractmethod 有step(),reset() 和 render()
gmy/envs/mujoco_env.py 中定义继承基类 gym.Env 的类 BaseMujocoEnv 以及定义了继承 BaseMujocoEnv 的 MujocoEnv
half_cheetah_v4.py 中定义了继承 MujocoEnv 的 HalfCheetahEnv
python 新知
用户定义的泛型类型 $*$
1 | class Env(Generic[ObsType, ActType]): |
MICRO_Quadruped_ARCHIVE 阅读并添加注释
reinforcement_learning.py
2023.07.15
MICRO_Quadruped_ARCHIVE 阅读并添加注释
utils.py
Gait Analysis
Here are some video clips.
Analytic
Real
Analysis of 3 Dogs’ Gaits – Walk, Trot, Transverse Gallop - YouTube
Model
Locomotion Skills for Simulated Quadrupeds - YouTube
2023.07.16
Trust Region Method
Videos
- CS885 Lecture 15a: Trust Region Policy Optimization (Presenter: Shivam Kalra) - YouTube
- Trust Regions - YouTube (很简明,值得一看)