本周总结
主要工作总结
- Go1 步态复现
- 学习逆运动学并编写代码
2023.08.01
测试文件管理 (续)
方案一
任务导向
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
| > Logs
> A1_flat
> ANYmal_flat
> Go1_rough
> Go1_flat
> Year-Month-Date_Obs(48)_with-base-vel_
> checkpoints
- model_*.pt
> videos
- *.mp4
> policy
- policy.pt
> tensorboard
- events.out.tfevents.*
> training config
> Year-Month-Date_Obs(45)_non-base-vel_
> Good results (temp)
|
方案二
更新频率慢的 config 单独成文件夹
- observation num
- domain randomization
- heading command
- Kp, Kd
- …
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
| - Logs
- A1_flat
- ANYmal_flat
- Go1_rough
- Go1_flat
- dr
- dr(F)
README.md
parent_config.py
- Year-Month-Date_fat(2)
- checkpoints
- videos
- tensorboard
- policy
child_config.py
training_setting.md
- Year-Month-Date_fat(5)
- headingcommand(F)
- Good results (temp)
|
树结构
假设 Go1_flat 文件夹下进行了 2000 次测试,最后每个文件夹内包含 20 ~ 30 次测试
设三级文件夹目录:A(10) - B(10) - C(20/30)
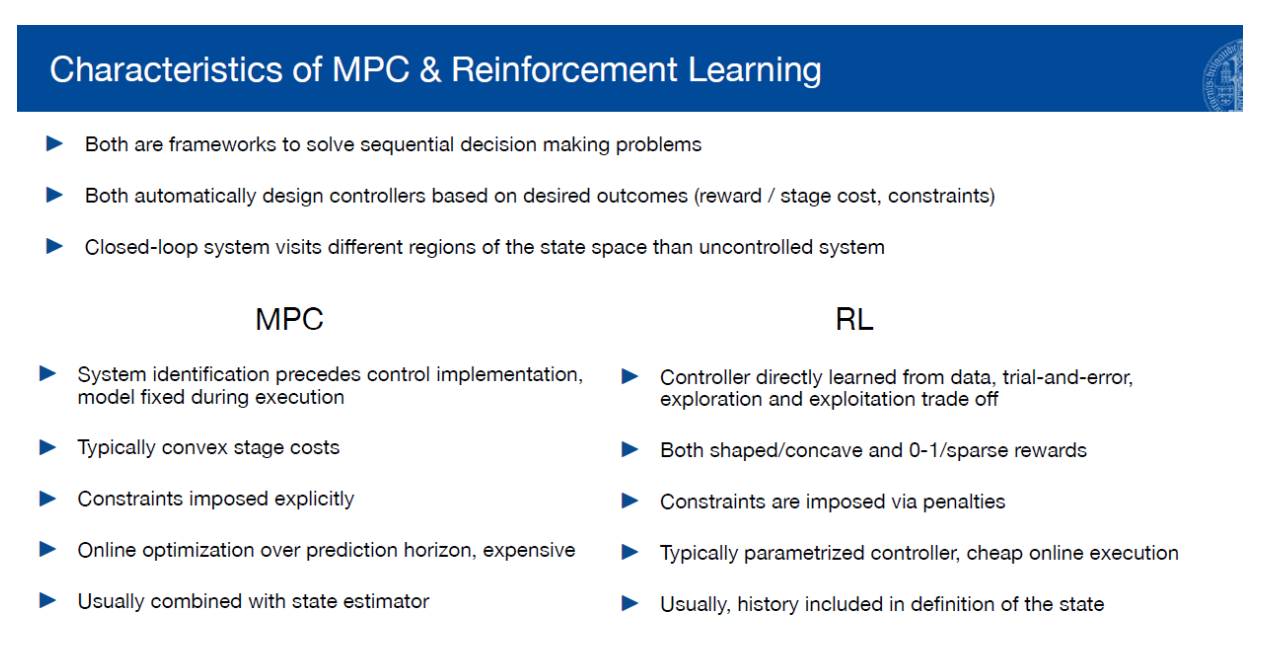
Model Predictive Control
一个模型预测控制(MPC)的简单实现 - 知乎
模型预测控制简介(model predictive control) - 知乎
模型预测控制 - 知乎
Reward Functions and Scales
Reward functions 的分类 / 重要性 / 特性
Reward function 与 Scales 的调整思路
分类
任务导向 / 姿态 / 自然 / 稳定性 / 敏捷性
对称性
一切从零开始
- 按照重要性分阶段添加 Reward functions
- 每一阶段逐步增加 Scale,观察效果 (指标?)
- 按照需求增加功能对立的 Reward functions
- Scale 从小到大变化,看是否得到更好的结果
2023.08.01
2023.08.03
正逆运动学
机器人的运动学解——逆向运动学解 | 知乎
干货 | “逆运动学”——从操作空间到关节空间 (上篇) | 知乎
干货 | “逆运动学”——从操作空间到关节空间 (下篇) | 知乎
以上三篇简明易懂,值得一读
Inverse Kinematics
机器人(机械臂)轨迹规划中,运动到奇异点,关节速度过大怎么解决? | 知乎
三维空间中的几何变换-平移旋转缩放 | swety_gxy 的博客
三维空间中的几何变换 (旋转矩阵、变换矩阵、旋转向量、欧拉角、四元数) | CV 科研随想录 的博客
2023.08.04
写 Isaac Gym 文档
- skrl (1.0.0-rc.1)
2023.08.05
逆运动学
写正逆运动学代码
Pytorch
- Tensors — PyTorch Tutorials 2.0.1+cu117 documentation
- 浅谈 PyTorch 中的 tensor 及使用 pytorch tensor | Adenialzz 的博客
- Pytorch 基础 Tensor 数据类型与常用函数
- Pytorch 基础 tensor 数据结构
- torch.matmul() 函数的文档详解 | Lowell_liu
- torch.unsqueeze() 方法 | 想变厉害的大白菜的博客
- torch.where() 用法 | euqlll 的博客
Inverse-Kinematic-Analysis-Of-A-Quadruped-Robot.pdf